Gradient Robotics
coming soonBuilding autonomous robots and scaling deployment. Announcement coming soon.
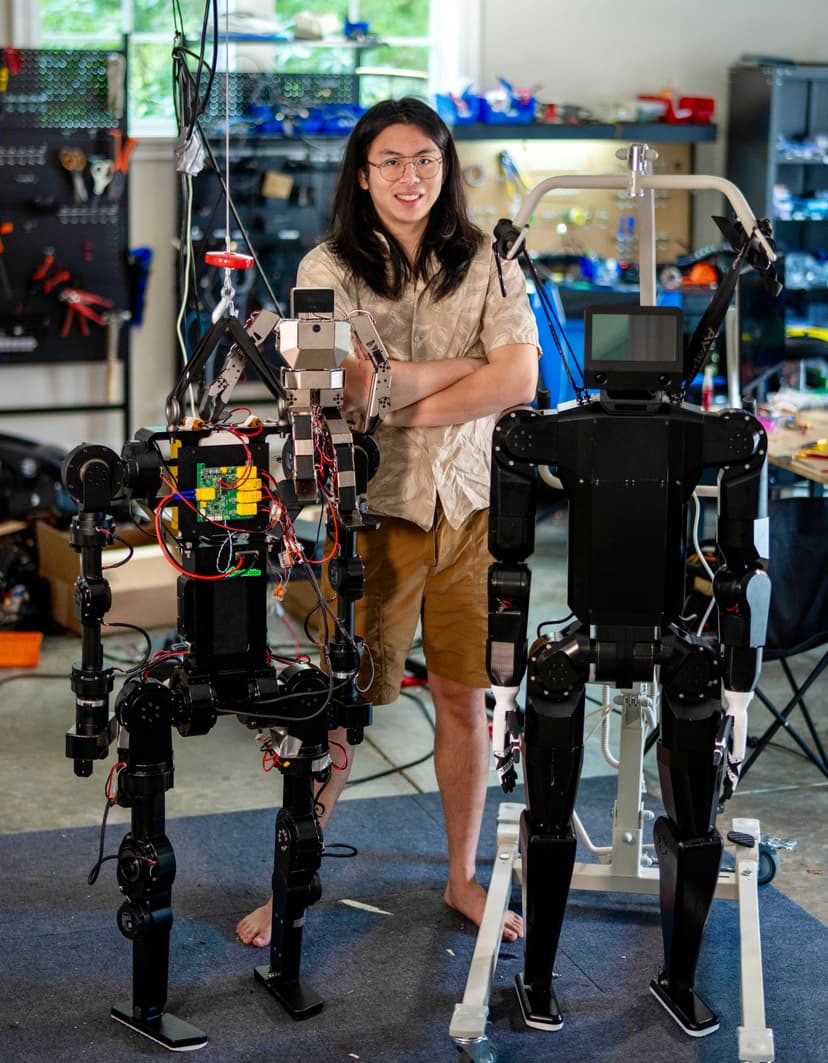
I'm the Co-Founder & CEO of Gradient Robotics. Previously Head of Product & Engineering at K-Scale Labs (YC W24), where I led the team that built the first consumer open-source humanoids in the US — selling 150+ units for $2M+ to developers and labs worldwide. I've worked across mechanical, electrical, design, software, ML (RL & VLA), and manufacturing.
Today, we're building something far more ambitious — autonomous robots with 10x human capabilities that can be reliably deployed at scale across every industry that desperately needs them. If you're interested, contact us.
I believe that all problems are engineering problems, and all engineering problems have engineering solutions.
My personal mission is to work on the biggest civilizational problems, which include:
I've been a big Asimov fan since I was a kid — Foundation and the Robot novels shaped a lot of how I think about long-term civilizational change and the role of technology in it.
I'm Canadian and grew up in Vancouver. I studied at McGill University and NTU Singapore. I'm a backpacker and have traveled all around the world. I enjoy endurance sports like marathon running (2x) and extreme sports like skydiving.
Building autonomous robots and scaling deployment. Announcement coming soon.
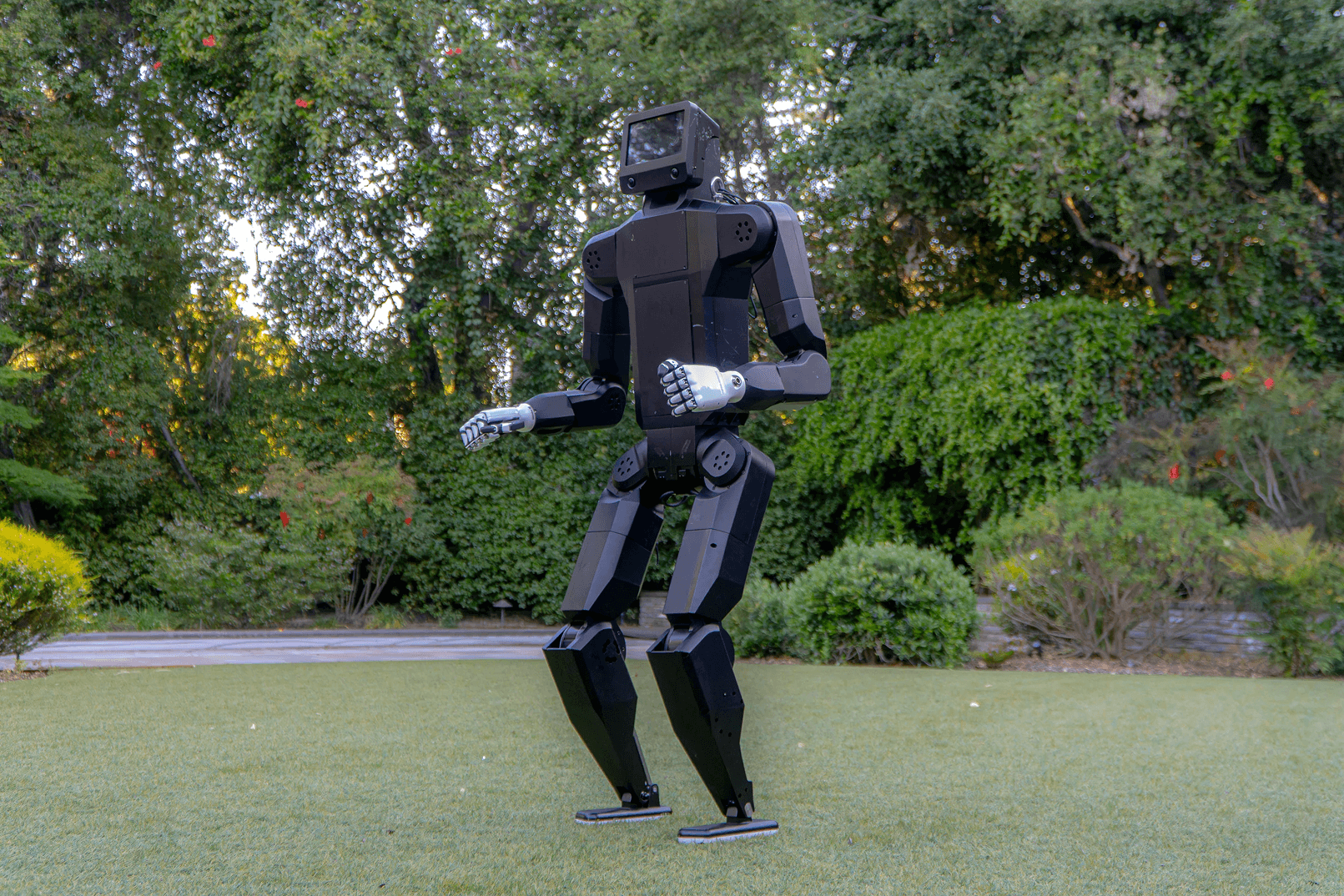

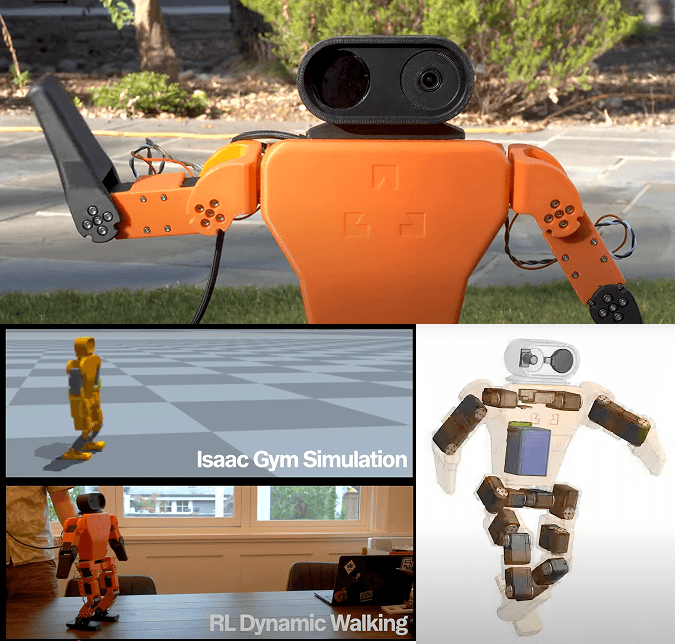
K-Bot is an open-source, developer-focused humanoid platform I started as a skunkworks project at K-Scale. As Head of Product & Engineering, I built and led the team across the full stack: RL-based whole body control with sim2real, ML training library, operating system, hardware design, and manufacturing from prototyping to production in less than 6 months — as well as product design and marketing. K-Bot is the United States' first consumer & open-source humanoid robot. In the July 2025 launch, we sold out 150+ pre-order units for USD$2M+ to developers and research labs, and delivered the first batch before the company's abrupt and unexpected shutdown.
2025
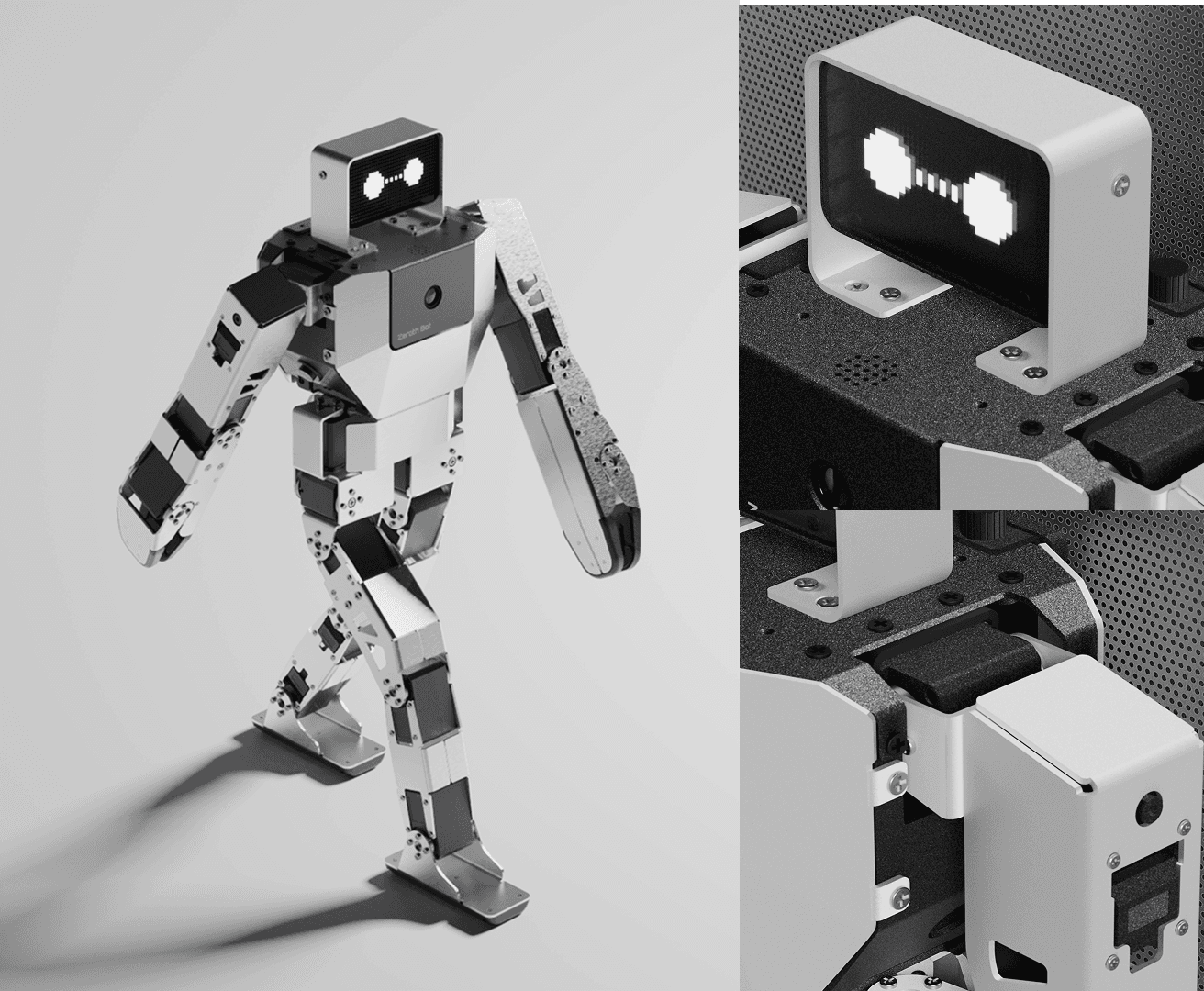
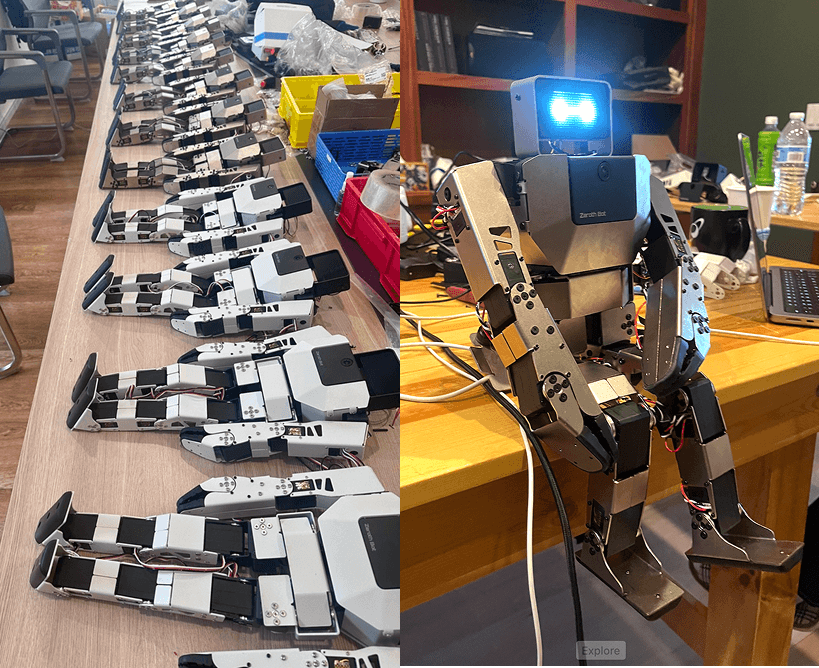
Building on the Zeroth-01, I led the team to develop Zeroth Bot — a $2k open-source humanoid with an open-source SDK & sim for RL/VLA training. Prototypes were validated in Stanford's CS234 Reinforcement Learning course, and the public waitlist grew to 20k+. We partnered with JoyIn, a consumer robotics company, to bring the robot to the world. Launched by JoyIn at CES and covered by CNET.
2025
Zeroth-01 is the world's smallest 3D printable and open-source end-to-end humanoid robot for $350 BoM. I created it with Kelsey and Denys — we designed and built the full stack from RL training and the operating system to hardware, and launched it. The open-source community now has 5000+ members with over 700+ stars on GitHub, used by educators, developers, and labs all over the world.
2024

As engineering project lead, we built an industrial robot visual programming, testing, and deployment platform that allowed non-programmers to construct industrial robot behavior trees through a graphical interface, allowing testing in simulation, debugging, and deployment onto real robots. We shipped features to partners and clients including Mecademic Robotics.
2024

Worked on the F1TENTH team at NTU for the autonomous racing challenge. Designed the software architecture for ROS topics, vehicle state, dynamics, and navigation, and implemented global trajectory planning and local avoidance algorithms in ROS2.
NTU Singapore (2024)
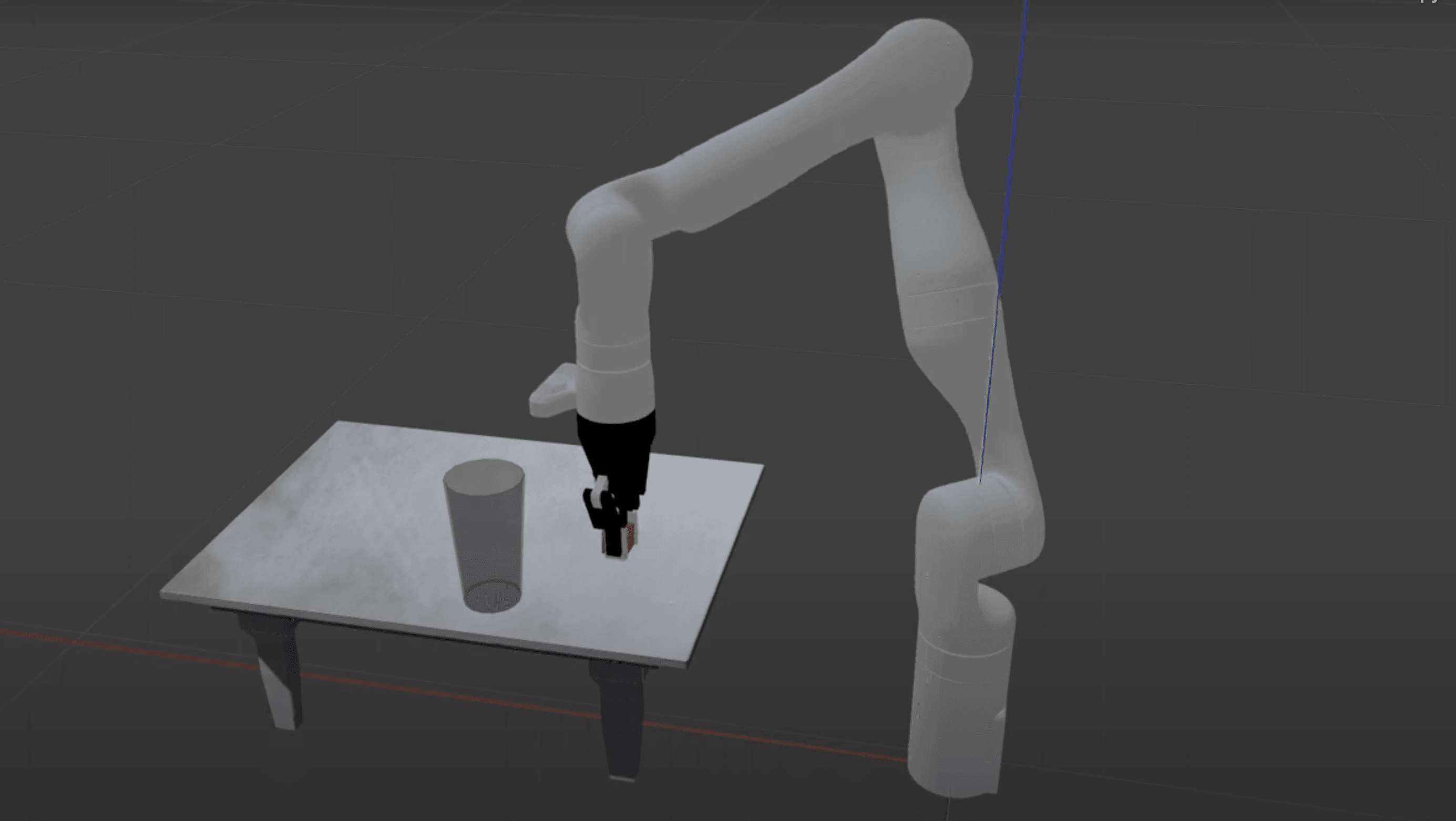
Built controllers, planners, inverse/forward kinematic/dynamics algorithms, and an action client/server framework in ROS1/C++ for the Kinova Gen3 robotic arms for dynamic grasping. Controllers covered kinematics and dynamic control, redundancy resolution, force control and contacts, and grasping. Planners covered trajectory generation, potential fields, and collision detection and avoidance.
McGill University (2023)
IROS 2024: 3rd Workshop on Mobile Manipulation and Embodied Intelligence (MOMA.v3)
Paweł Budzianowski, Wesley Maa, Matthew Freed, Jingxiang Mo, Winston Hsiao, Aaron Xie, Tomasz Młoduchowski, Viraj Tipnis, Benjamin Bolte
AI Engineer World's Fair 2025
~3,000 attendees · 14k+ views · featured session with speakers from Physical Intelligence, NVIDIA, Waymo
ETHSF 2025, UC Berkeley
featured in session with Vitalik Buterin, Mary Lou Jepsen, Jan Liphardt